
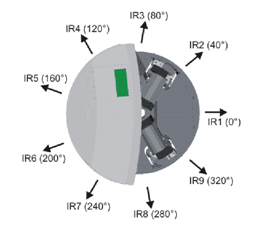
Robotino merupakan platform robot industri produksi FESTO yang memungkinkan untuk dikembangkan dengan menambah unsur mekanik maupun elektronik (sensor atau motor).Berdasarkan spesifikasi yang dikeluarkan oleh Festo didactic, Power supply pada robot ini menggunakan dua buah battery 12 V yang mampu digunakan sampai 2 jam. Konsep gerak robot mengggunakan metode steering 3 wheels omni-directional dengan 3 buah motor DC 3600 rpm yang dilengkapi dengan Planetary gear serta toothed belt, sehingga total transmisinya 16:1. Sensor putaran menggunakan Incremental encoder dengan resolusi 2048 setiap motor per satu putaran. Guna mendeteksi obyek, robotino dilengkapi 9 buah sensor Optical Range Finder tipe GP2D120 keluaran SHARP, dimana antar sensor membentuk sudut 40˚ serta webcam sebagai vision sensor. Semua device ini akan terhubung dengan Main Controller.
 Guna mendukung akses pheriperal eksternal maupun internal, robotino dilengkapi dengan card I/O EA09 board. Komunikasi antara EA09 dengan main controller menggunakan serial RS232.
Guna mendukung akses pheriperal eksternal maupun internal, robotino dilengkapi dengan card I/O EA09 board. Komunikasi antara EA09 dengan main controller menggunakan serial RS232.
 Main Controller yang digunakan robotino adalah embedded PC 104 dengan processor AMD LX800 800Mhz. Spesifikasi yang lain dari embedded PC 104 adalah SDRAM 64 Mb, Compact Flash Card (128 Mb) dengan operating system Linux, Wireless LAN interface dengan standart 802.11.g dan 802.11.b., 2 Ethernet, 2 port USB, 2 port RS232, Parallel port dan VGA Port. Pemrograman embedded PC 104 ada 2 cara yaitu melalui komunikasi TCP/IP dengan PC luar . Operating System (OS) yang digunakan Robotino dibagi menjadi 2 buah lapisan/layer, yaitu Regular Linux Layer dan Real Time Linux (RTLinux) Layer. Semua akses perangkat keras melewati lapisan RTLinux, sedangkan lapisan Linux menyediakan ruang untuk akses secara internal. Pada lapisan RTLinux semua hardware diakses menggunakan program Robotino View/C++ dan menggunakan library C++ pada lapisan Linux. Pengendalian robot secara real time dapat diremote menggunakan PC dengan lapisan RTLinux melalui komunikasi wireless.
Main Controller yang digunakan robotino adalah embedded PC 104 dengan processor AMD LX800 800Mhz. Spesifikasi yang lain dari embedded PC 104 adalah SDRAM 64 Mb, Compact Flash Card (128 Mb) dengan operating system Linux, Wireless LAN interface dengan standart 802.11.g dan 802.11.b., 2 Ethernet, 2 port USB, 2 port RS232, Parallel port dan VGA Port. Pemrograman embedded PC 104 ada 2 cara yaitu melalui komunikasi TCP/IP dengan PC luar . Operating System (OS) yang digunakan Robotino dibagi menjadi 2 buah lapisan/layer, yaitu Regular Linux Layer dan Real Time Linux (RTLinux) Layer. Semua akses perangkat keras melewati lapisan RTLinux, sedangkan lapisan Linux menyediakan ruang untuk akses secara internal. Pada lapisan RTLinux semua hardware diakses menggunakan program Robotino View/C++ dan menggunakan library C++ pada lapisan Linux. Pengendalian robot secara real time dapat diremote menggunakan PC dengan lapisan RTLinux melalui komunikasi wireless.












